Mercury robot challenge 2016¶
Voyager Technical Document
![]()
Team
- Julio Cesar Castellanos - julio.castellanosa@campusucc.edu.co
- Ivan Dario - ivan.ortizp@campusucc.edu.co
- Rafael Vergara - Rafael.vergarah@campusucc.edu.co
- Luis Villadiego - luis.villadiego@campusucc.edu.co
Summary¶
This technical document describes the creation and specs of a remotely controlled robot. The Robot “Voyager” was designed and built to meet the requirements of the Oklahoma State University Mercury Robotics competition for 2016 in Bogota, Colombia.
Highlevel block diagram¶
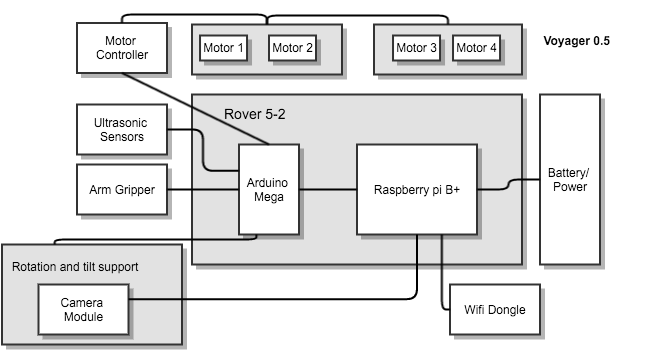
Communication¶
The microcontroller will be conecte via serial to the raspberry pi, on the raspberry we use a Nodejs library in order to expose a real time socket web based server. For handle browser events we use jQuery and keypress in order to detect when a key is pressed then and do a socket emit.
Main board¶
The robot uses the Raspberri pi B+ as the principal board, this board allow the commnincation to a higer level user application using a Sockect TCP server. It is attached direclty to the microcontroller via serial USB port.
Video feedback¶
The robot has a camera module attached to the raspberry pi, we expose this camera thougth a UDP video stream server.
Cotroller interface¶
We have a web based interface using HTML,CSS and Javascript to handle browser events.
Drive train¶
The robot has one motor per side, each running a tread through a gearbox with an encoder.
Subsystems¶
The robot has two Ultrasonic sensors......
Power¶
The robot has a 7.2[V] standard 3000[mAh] NiMH battery.